|
rllib
1
|
|
rllib
1
|
#include <rlmodbus.h>
Classes | |
| union | DATA |
Public Types | |
| enum | Modbus { MODBUS_CHECKSUM_ERROR = -2, MODBUS_ERROR = -1, MODBUS_SUCCESS = 0, MODBUS_RTU = 1, MODBUS_ASCII = 2 } |
| enum | ModbusFunctionCodes { ReadCoilStatus = 1, ReadInputStatus = 2, ReadHoldingRegisters = 3, ReadInputRegisters = 4, ForceSingleCoil = 5, PresetSingleRegister = 6, ReadExceptionStatus = 7, FetchCommEventCtr = 11, FetchCommEventLog = 12, ForceMultipleCoils = 15, PresetMultipleRegs = 16, ReportSlaveID = 17, ReadGeneralReference = 20, WriteGeneralReference = 21, MaskWrite4XRegisters = 22, ReadWrite4XRegisters = 23, ReadFifoQueue = 24 } |
Public Member Functions | |
| rlModbus (long max_telegram_length=1024, int mode=MODBUS_RTU, char end_delimitor=0x0a) | |
| virtual | ~rlModbus () |
| int | write (int slave, int function, const unsigned char *data, int len, int *transactionID=NULL) |
| int | request (int slave, int function, int start_adr, int num_register) |
| int | response (int *slave, int *function, unsigned char *data, int timeout=1000) |
| int | readRequest (int *slave, int *function, unsigned char *data, int timeout=1000, int *transactionID=NULL) |
| void | registerSocket (rlSocket *socket) |
| void | registerSerial (rlSerial *serial) |
| int | data2int (const unsigned char *data) |
| int | int2data (int val, unsigned char *data) |
| int | intsize () |
| int | readCoilStatus (int slave, int start_adr, int number_of_coils, unsigned char *status, int timeout=1000) |
| int | readInputStatus (int slave, int start_adr, int number_of_inputs, unsigned char *status, int timeout=1000) |
| int | readHoldingRegisters (int slave, int start_adr, int number_of_registers, int *registers, int timeout=1000) |
| int | readInputRegisters (int slave, int start_adr, int number_of_registers, int *registers, int timeout=1000) |
| int | forceSingleCoil (int slave, int coil_adr, int value, int timeout=1000) |
| int | presetSingleRegister (int slave, int register_adr, int value, int timeout=1000) |
| int | forceMultipleCoils (int slave, int coil_adr, int number_of_coils, unsigned char *coils, int timeout=1000) |
| int | presetMultipleRegisters (int slave, int start_adr, int number_of_registers, int *registers, int timeout=1000) |
Public Attributes | |
| int | autoreconnectSocket |
Private Member Functions | |
| int | buf2int_rtu (unsigned char *buf) |
| void | int2buf_rtu (int i, unsigned char *buf) |
| int | buf2int_ascii (unsigned char *buf) |
| void | int2buf_ascii (int i, unsigned char *buf) |
| void | insertLRC (int len) |
| void | insertCRC (int len) |
| int | LRCerror (int len) |
| int | CRCerror (int len) |
Private Attributes | |
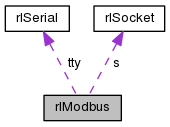
| rlSocket * | s |
| rlSerial * | tty |
| unsigned char * | tel |
| long | maxtel |
| int | mode |
| char | delimitor |
This class implements the modbus protocol. You can use serial interfaces or TCP/IP. Modbus RTU and ASCII are available.
All Modbus requests include "slave" and "function". Then some bytes follow, which are specific to a given function. The request is then terminated by a checksum.
This table shows the bytes that are specific to a given function.
| Function | Query | Response | |
| 01 Read Coil Status | Start adr high Start adr low Number of points high Number of points low | Data Byte Count Data1 Data2 … | 8 points per byte |
| 02 Read Input Status | Start adr high Start adr low Number of points high Number of points low | Data Byte Count Data1 Data2 … | 8 points per byte |
| 03 Read Holding Registers | Start adr high Start adr low Number of points high Number of points low | Data Byte Count Data1 high Data1 low Data2 high Data2 low… | 1 point needs 2 bytes |
| 04 Read Input Registers | Start adr high Start adr low Number of points high Number of points low | Data Byte Count Data1 high Data1 low Data2 high Data2 low… | 1 point needs 2 bytes |
| 05 Force Single Coil | Coil adr high Coil adr low Force data high Force data low | Coil adr high Coil adr low Force data high Force data low | Force data ON = 0x0ff00 Force data OFF = 0 |
| 06 Preset Single Register | Register adr high Register adr low Preset data high Preset data low | Register adr high Register adr low Preset data high Preset data low | |
| 07 Read Exception Status | Coil data | 8 exception status coils returned | |
| 11 Fetch Comm Event Counter | Status high Status low Event Count high Event Count low | ||
| 12 Fetch Comm Event Log | See: PI_MODBUS_300.pdf | ||
| 15 Force Multiple Coils | Coil adr high Coil adr low Number of coils high Number of coils low Force data byte count Force data1 Force data2 ... | Coil adr high Coil adr low Number of coils high Number of coils low | 8 coils per byte |
| 16 Preset Multiple Registers | Start adr high Start adr low Number of registers high Number of registers low Data byte count Data1 high Data1 low Data2 high Data2 low … | Start adr high Start adr low Number of registers high Number of registers low | |
| 17 Report Slave ID | Data Byte count ~ device specific | See: PI_MODBUS_300.pdf | |
| 20 Read General Reference | See: PI_MODBUS_300.pdf | ||
| 21 Write General Reference | See: PI_MODBUS_300.pdf | ||
| 22 Mask Write 4X Register | See: PI_MODBUS_300.pdf | ||
| 23 Read/Write 4X Registers | See: PI_MODBUS_300.pdf | ||
| 24 Read FIFO Queue | See: PI_MODBUS_300.pdf |
Definition at line 148 of file rlmodbus.h.
| enum rlModbus::Modbus |
| Enumerator | |
|---|---|
| MODBUS_CHECKSUM_ERROR | |
| MODBUS_ERROR | |
| MODBUS_SUCCESS | |
| MODBUS_RTU | |
| MODBUS_ASCII | |
Definition at line 173 of file rlmodbus.h.
Definition at line 182 of file rlmodbus.h.
| rlModbus::rlModbus | ( | long | max_telegram_length = 1024, |
| int | mode = MODBUS_RTU, |
||
| char | end_delimitor = 0x0a |
||
| ) |
Definition at line 20 of file rlmodbus.cpp.
|
virtual |
Definition at line 32 of file rlmodbus.cpp.
|
private |
Definition at line 614 of file rlmodbus.cpp.
|
private |
Definition at line 599 of file rlmodbus.cpp.
|
private |
Definition at line 748 of file rlmodbus.cpp.
| int rlModbus::data2int | ( | const unsigned char * | data | ) |
Definition at line 37 of file rlmodbus.cpp.
| int rlModbus::forceMultipleCoils | ( | int | slave, |
| int | coil_adr, | ||
| int | number_of_coils, | ||
| unsigned char * | coils, | ||
| int | timeout = 1000 |
||
| ) |
We assume positive values for registers: 0 <= registers < 256*256
Definition at line 922 of file rlmodbus.cpp.
| int rlModbus::forceSingleCoil | ( | int | slave, |
| int | coil_adr, | ||
| int | value, | ||
| int | timeout = 1000 |
||
| ) |
Definition at line 873 of file rlmodbus.cpp.
|
private |
Definition at line 730 of file rlmodbus.cpp.
|
private |
Definition at line 627 of file rlmodbus.cpp.
|
private |
Definition at line 622 of file rlmodbus.cpp.
|
private |
Definition at line 604 of file rlmodbus.cpp.
| int rlModbus::int2data | ( | int | val, |
| unsigned char * | data | ||
| ) |
Definition at line 42 of file rlmodbus.cpp.
| int rlModbus::intsize | ( | ) |
Definition at line 49 of file rlmodbus.cpp.
|
private |
Definition at line 645 of file rlmodbus.cpp.
| int rlModbus::presetMultipleRegisters | ( | int | slave, |
| int | start_adr, | ||
| int | number_of_registers, | ||
| int * | registers, | ||
| int | timeout = 1000 |
||
| ) |
We assume positive values for registers: 0 <= registers < 256*256
Definition at line 949 of file rlmodbus.cpp.
| int rlModbus::presetSingleRegister | ( | int | slave, |
| int | register_adr, | ||
| int | value, | ||
| int | timeout = 1000 |
||
| ) |
We assume positive values for registers: 0 <= value < 256*256
Definition at line 898 of file rlmodbus.cpp.
| int rlModbus::readCoilStatus | ( | int | slave, |
| int | start_adr, | ||
| int | number_of_coils, | ||
| unsigned char * | status, | ||
| int | timeout = 1000 |
||
| ) |
Definition at line 767 of file rlmodbus.cpp.
| int rlModbus::readHoldingRegisters | ( | int | slave, |
| int | start_adr, | ||
| int | number_of_registers, | ||
| int * | registers, | ||
| int | timeout = 1000 |
||
| ) |
We assume positive values for registers: 0 <= registers < 256*256
Definition at line 815 of file rlmodbus.cpp.
| int rlModbus::readInputRegisters | ( | int | slave, |
| int | start_adr, | ||
| int | number_of_registers, | ||
| int * | registers, | ||
| int | timeout = 1000 |
||
| ) |
We assume positive values for registers: 0 <= registers < 256*256
Definition at line 844 of file rlmodbus.cpp.
| int rlModbus::readInputStatus | ( | int | slave, |
| int | start_adr, | ||
| int | number_of_inputs, | ||
| unsigned char * | status, | ||
| int | timeout = 1000 |
||
| ) |
Definition at line 791 of file rlmodbus.cpp.
| int rlModbus::readRequest | ( | int * | slave, |
| int * | function, | ||
| unsigned char * | data, | ||
| int | timeout = 1000, |
||
| int * | transactionID = NULL |
||
| ) |
Definition at line 352 of file rlmodbus.cpp.
| void rlModbus::registerSerial | ( | rlSerial * | serial | ) |
Definition at line 593 of file rlmodbus.cpp.
| void rlModbus::registerSocket | ( | rlSocket * | socket | ) |
Definition at line 587 of file rlmodbus.cpp.
| int rlModbus::request | ( | int | slave, |
| int | function, | ||
| int | start_adr, | ||
| int | num_register | ||
| ) |
Definition at line 121 of file rlmodbus.cpp.
| int rlModbus::response | ( | int * | slave, |
| int * | function, | ||
| unsigned char * | data, | ||
| int | timeout = 1000 |
||
| ) |
Definition at line 132 of file rlmodbus.cpp.
| int rlModbus::write | ( | int | slave, |
| int | function, | ||
| const unsigned char * | data, | ||
| int | len, | ||
| int * | transactionID = NULL |
||
| ) |
Definition at line 54 of file rlmodbus.cpp.
| int rlModbus::autoreconnectSocket |
Definition at line 214 of file rlmodbus.h.
|
private |
Definition at line 253 of file rlmodbus.h.
|
private |
Definition at line 251 of file rlmodbus.h.
|
private |
Definition at line 252 of file rlmodbus.h.
|
private |
Definition at line 248 of file rlmodbus.h.
|
private |
Definition at line 250 of file rlmodbus.h.
|
private |
Definition at line 249 of file rlmodbus.h.
 1.8.14
1.8.14

