#include <rlcontroller.h>
Public Types | |
| enum | ControllerType { P = 1, I = 2, D_T1 = 3, PI = 4, PD_T1 = 5, PID_T1 = 6, PI_SUM = 7, PD_T1_SUM = 8, PID_T1_SUM = 9 } |
Public Member Functions | |
| rlController (double(*_getMeasurement)(), void(_writeOutput)(double output)) | |
| ~rlController () | |
| void | start () |
| void | stop () |
| void | setReference (double _reference) |
| void | setP (double _T, double _Kp) |
| void | setI (double _T, double _T1) |
| void | setD_T1 (double _T, double _TD, double _Td) |
| void | setPI (double _T, double _Kp, double _Tn) |
| void | setPD_T1 (double _T, double _Kp, double _TvP, double _Td) |
| void | setPID_T1 (double _T, double _Kpp, double _TnP, double _TvP, double _Td) |
| void | setPI_SUM (double _T, double _Kp, double _Tn) |
| void | setPD_T1_SUM (double _T, double _Kp, double _Tv, double _Td) |
| void | setPID_T1_SUM (double _T, double _Kp, double _Tn, double _Tv, double _Td) |
| void | setLimits (double _yk_min, double _yk_max) |
| void | resetLimits () |
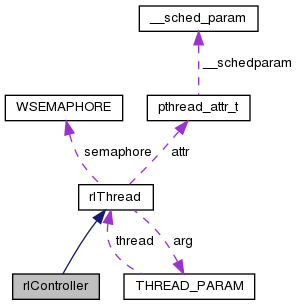
 Public Member Functions inherited from rlThread Public Member Functions inherited from rlThread | |
| rlThread (int max_semphore=1000) | |
| virtual | ~rlThread () |
| int | create (void *(*func)(void *), void *argument) |
| int | trylock () |
| int | lock () |
| int | unlock () |
| int | waitSemaphore () |
| int | incrementSemaphore () |
| int | join (void **status) |
| int | cancel () |
| void | threadExit (void *status) |
Public Attributes | |
| double | Kp |
| double | Kpp |
| double | T |
| double | T1 |
| double | Td |
| double | TD |
| double | Tn |
| double | TnP |
| double | TvP |
| double | Tv |
| double | reference |
| int | type |
| int | running |
| double | d0 |
| double | d1 |
| double | d2 |
| double | dD |
| double | c1 |
| double | c2 |
| double | cD |
| double | yk |
| double | yk_1 |
| double | yk_2 |
| double | ek |
| double | ek_1 |
| double | ek_2 |
| double | y1k |
| double | y1k_1 |
| double | ydk |
| double | ydk_1 |
| int | dt |
| double(* | getMeasurement )() |
| void(* | writeOutput )(double output) |
| int | sleepLocally |
| double | measurement |
| double | yk_min |
| double | yk_max |
| int | limited |
| Public Attributes inherited from rlThread | |
| pthread_t | tid |
| pthread_attr_t | attr |
| pthread_mutex_t | mutex |
| WSEMAPHORE | semaphore |
Detailed Description
class for closed loop control According to: F. Doerrscheid/W. Latzel, Grundlagen der Regelungstechnik, B.G. Teubner Stuttgart Page 436-437, Regelalgorithmen mit der Trapezregel
Definition at line 27 of file rlcontroller.h.
Member Enumeration Documentation
◆ ControllerType
| Enumerator | |
|---|---|
| P | |
| I | |
| D_T1 | |
| PI | |
| PD_T1 | |
| PID_T1 | |
| PI_SUM | |
| PD_T1_SUM | |
| PID_T1_SUM | |
Definition at line 30 of file rlcontroller.h.
Constructor & Destructor Documentation
◆ rlController()
| rlController::rlController | ( | double(*)() | _getMeasurement, |
| void(_writeOutput)(double output) | |||
| ) |
Definition at line 79 of file rlcontroller.cpp.
◆ ~rlController()
| rlController::~rlController | ( | ) |
Definition at line 103 of file rlcontroller.cpp.
Member Function Documentation
◆ resetLimits()
| void rlController::resetLimits | ( | ) |
◆ setD_T1()
| void rlController::setD_T1 | ( | double | _T, |
| double | _TD, | ||
| double | _Td | ||
| ) |
TD * s
Transfer function: Gr(s) = ---------
1 + Td*s
T = cycle time in seconds
Definition at line 159 of file rlcontroller.cpp.
◆ setI()
| void rlController::setI | ( | double | _T, |
| double | _T1 | ||
| ) |
1
Transfer function: Gr(s) = ------
T1 * s
T = cycle time in seconds
Definition at line 146 of file rlcontroller.cpp.
◆ setLimits()
| void rlController::setLimits | ( | double | _yk_min, |
| double | _yk_max | ||
| ) |
◆ setP()
| void rlController::setP | ( | double | _T, |
| double | _Kp | ||
| ) |
Transfer function: Gr(s) = Kp
Definition at line 135 of file rlcontroller.cpp.
◆ setPD_T1()
| void rlController::setPD_T1 | ( | double | _T, |
| double | _Kp, | ||
| double | _TvP, | ||
| double | _Td | ||
| ) |
1 + TvP*s
Transfer function: Gr(s) = Kp * ---------
1 + Td*s
T = cycle time in seconds
Definition at line 187 of file rlcontroller.cpp.
◆ setPD_T1_SUM()
| void rlController::setPD_T1_SUM | ( | double | _T, |
| double | _Kp, | ||
| double | _Tv, | ||
| double | _Td | ||
| ) |
Tv*s
Transfer function: Gr(s) = Kp * ( 1 + -------- )
1 + Td*s
T = cycle time in seconds
Definition at line 232 of file rlcontroller.cpp.
◆ setPI()
| void rlController::setPI | ( | double | _T, |
| double | _Kp, | ||
| double | _Tn | ||
| ) |
1 + Tn*s
Transfer function: Gr(s) = Kp * --------
Tn*s
T = cycle time in seconds
Definition at line 173 of file rlcontroller.cpp.
◆ setPI_SUM()
| void rlController::setPI_SUM | ( | double | _T, |
| double | _Kp, | ||
| double | _Tn | ||
| ) |
1
Transfer function: Gr(s) = Kp * ( 1 + ---- )
Tn*s
T = cycle time in seconds
Definition at line 220 of file rlcontroller.cpp.
◆ setPID_T1()
| void rlController::setPID_T1 | ( | double | _T, |
| double | _Kpp, | ||
| double | _TnP, | ||
| double | _TvP, | ||
| double | _Td | ||
| ) |
1 + TnP*s 1 + TvP*s
Transfer function: Gr(s) = Kpp * --------- * ---------
TnP*s 1 + Td*s
T = cycle time in seconds
Definition at line 202 of file rlcontroller.cpp.
◆ setPID_T1_SUM()
| void rlController::setPID_T1_SUM | ( | double | _T, |
| double | _Kp, | ||
| double | _Tn, | ||
| double | _Tv, | ||
| double | _Td | ||
| ) |
1 Tv*s
Transfer function: Gr(s) = Kp * ( 1 + ---- + -------- )
Tn*s 1 + Td*s
T = cycle time in seconds
Definition at line 246 of file rlcontroller.cpp.
◆ setReference()
| void rlController::setReference | ( | double | _reference | ) |
◆ start()
| void rlController::start | ( | ) |
Definition at line 108 of file rlcontroller.cpp.
◆ stop()
| void rlController::stop | ( | ) |
Definition at line 124 of file rlcontroller.cpp.
Member Data Documentation
◆ c1
| double rlController::c1 |
Definition at line 127 of file rlcontroller.h.
◆ c2
| double rlController::c2 |
Definition at line 127 of file rlcontroller.h.
◆ cD
| double rlController::cD |
Definition at line 127 of file rlcontroller.h.
◆ d0
| double rlController::d0 |
Definition at line 126 of file rlcontroller.h.
◆ d1
| double rlController::d1 |
Definition at line 126 of file rlcontroller.h.
◆ d2
| double rlController::d2 |
Definition at line 126 of file rlcontroller.h.
◆ dD
| double rlController::dD |
Definition at line 126 of file rlcontroller.h.
◆ dt
| int rlController::dt |
Definition at line 131 of file rlcontroller.h.
◆ ek
| double rlController::ek |
Definition at line 129 of file rlcontroller.h.
◆ ek_1
| double rlController::ek_1 |
Definition at line 129 of file rlcontroller.h.
◆ ek_2
| double rlController::ek_2 |
Definition at line 129 of file rlcontroller.h.
◆ getMeasurement
| double(* rlController::getMeasurement) () |
You have to supply this function for getting the measurement
Definition at line 136 of file rlcontroller.h.
◆ Kp
| double rlController::Kp |
Don't set the controller parameters directly Use the set methods, because they will also set the coefficients Controller parameters are for reading only
Definition at line 123 of file rlcontroller.h.
◆ Kpp
| double rlController::Kpp |
Definition at line 123 of file rlcontroller.h.
◆ limited
| int rlController::limited |
Definition at line 160 of file rlcontroller.h.
◆ measurement
| double rlController::measurement |
last measurement
Definition at line 154 of file rlcontroller.h.
◆ reference
| double rlController::reference |
Definition at line 123 of file rlcontroller.h.
◆ running
| int rlController::running |
Definition at line 125 of file rlcontroller.h.
◆ sleepLocally
| int rlController::sleepLocally |
Default sleepLocally = 1 But: Sleeping locally might me inaccurate. It might be better to have a central timer and wait for it in double (*_getMeasurement)(); T = cycle time in seconds
Definition at line 150 of file rlcontroller.h.
◆ T
| double rlController::T |
Definition at line 123 of file rlcontroller.h.
◆ T1
| double rlController::T1 |
Definition at line 123 of file rlcontroller.h.
◆ Td
| double rlController::Td |
Definition at line 123 of file rlcontroller.h.
◆ TD
| double rlController::TD |
Definition at line 123 of file rlcontroller.h.
◆ Tn
| double rlController::Tn |
Definition at line 123 of file rlcontroller.h.
◆ TnP
| double rlController::TnP |
Definition at line 123 of file rlcontroller.h.
◆ Tv
| double rlController::Tv |
Definition at line 123 of file rlcontroller.h.
◆ TvP
| double rlController::TvP |
Definition at line 123 of file rlcontroller.h.
◆ type
| int rlController::type |
Definition at line 124 of file rlcontroller.h.
◆ writeOutput
| void(* rlController::writeOutput) (double output) |
You have to supply this function for writing the output
Definition at line 140 of file rlcontroller.h.
◆ y1k
| double rlController::y1k |
Definition at line 130 of file rlcontroller.h.
◆ y1k_1
| double rlController::y1k_1 |
Definition at line 130 of file rlcontroller.h.
◆ ydk
| double rlController::ydk |
Definition at line 130 of file rlcontroller.h.
◆ ydk_1
| double rlController::ydk_1 |
Definition at line 130 of file rlcontroller.h.
◆ yk
| double rlController::yk |
Definition at line 128 of file rlcontroller.h.
◆ yk_1
| double rlController::yk_1 |
Definition at line 128 of file rlcontroller.h.
◆ yk_2
| double rlController::yk_2 |
Definition at line 128 of file rlcontroller.h.
◆ yk_max
| double rlController::yk_max |
Definition at line 159 of file rlcontroller.h.
◆ yk_min
| double rlController::yk_min |
limits
Definition at line 158 of file rlcontroller.h.
The documentation for this class was generated from the following files:
