#include <rlstate.h>
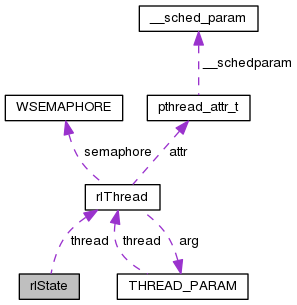
Collaboration diagram for rlState:
Public Member Functions | |
| rlState () | |
| ~rlState () | |
| int | startSteps (int cycletime) |
| int | runSteps (int cycletime) |
| void | gotoState (void(*funcPtr)(rlState *sm)) |
Public Attributes | |
| void * | user |
| int | stepCounter |
| int | cycletime |
| void(* | nextStep )(rlState *sm) |
| void(* | lastState )(rlState *sm) |
| rlThread | thread |
Static Public Attributes | |
| static const long | MAX_STEP = 1000*1000*1000 |
Detailed Description
This class is used to implement a statemachine.
Under pvbaddon/templates/statemachine/plc you find the statemachine consisting of several threads. The main thread will read/write a Modbus PLC. The statemachine stm2 will handle a small demo statemachine. The statemachine stm1 will start stm2 if the user selects this function.
The data will be stored in a shared memory.
The shared memory contains a complex datastructure (typedef struct {...} USER_DEFINED_STRUCTURE;) which can be used to exchange values between several processes.The pvbrowser visualization server is located under pvbaddon/templates/statemachine/pvs There we use a SVG graphic (stm2.svg) showing the statemachine. This graphic is generated by graphviz from stm2.dot pvs and plc exchange data only via shared memory.
Please start both (plc and pvs) in a separate terminal and then start the pvbrowser client
Here is some sourcecode from the template: // *************************************************************************** // main.cpp - description // ----------------— // begin : Sa. Mai 4 09:29:07 2013 // generated by : pvdevelop (C) Lehrig Software Engineering // email : lehrig@t-online.de // *************************************************************************** #include "plcapp.h"
SHM_DATA *shm_data; rlSharedMemory shm("/srv/automation/shm/plc.shm", sizeof(SHM_DATA)); rlSerial tty; rlModbus mb; rlMutex mb_mutex; rlState sm1, sm2;
//// helper functions
int printBinByte(unsigned char val)
{
if(val & BIT7) printf("1");
else printf("0");
if(val & BIT6) printf("1");
else printf("0");
if(val & BIT5) printf("1");
else printf("0");
if(val & BIT4) printf("1");
else printf("0");
printf(":");
if(val & BIT3) printf("1");
else printf("0");
if(val & BIT2) printf("1");
else printf("0");
if(val & BIT1) printf("1");
else printf("0");
if(val & BIT0) printf("1");
else printf("0");
return 0;
}int printBin(unsigned char *data)
{
printf("BinData: ");
printBinByte(data[0]);
printf(" - ");
printBinByte(data[1]);
return 0;
}//// Schneider PLC: first 4 bits are outputs then 6 bits input follow
static int readIO()
{
unsigned char data[256];
int ret;MB_readInputStatus(1,0,10,data); // read all IO values from modbus shm_data->plc.in.in1 = mb.data2int(data); // store data in shared memory
if(trace)
{
printf("readIO:: ret=%d ", ret);
printBin(data);
printf(" in1=%x\n", shm_data->plc.in.in1);
}
return 0;
}static int writeIO()
{
unsigned char coils[8];
int ret;coils[0] = shm_data->plc.out.out1 & 0x0ff; MB_forceMultipleCoils(1,0,4,coils); // write the 4 output bits to modbus
return 0; }
int main() { if(trace) printf("plc starting ...\n"); if(trace) printf("shm.status=%d\n", shm.status); if(shm.status != rlSharedMemory::OK) { printf("ERROR: shared memory status is not ok\n"); return -1; } shm_data = (SHM_DATA *) shm.getUserAdr(); memset(shm_data,0,sizeof(SHM_DATA)); if(tty.openDevice("/dev/ttyUSB0",B9600,1,1,8,1,rlSerial::NONE) < 0) { printf("ERROR: openDevice(\"/dev/tty/USB0")
"); } mb.registerSerial(&tty);
startStepsStm1(&sm1, 100); // start statemachine 1
startStepsStm2(&sm2, 100); // start statemachine 2
printf("going to IO loop\n");
while(1)
{
readIO();
writeIO();
rlsleep(10);
}
return 0;
}// ***************************************************************************** // stm2.cpp - description // ----------------— // begin : Sa. Mai 4 09:29:07 2013 // generated by : pvdevelop (C) Lehrig Software Engineering // email : lehrig@t-online.de // A simple template for implementing your own statemachine // See: pvbaddon/templates/statemachine // ***************************************************************************** #include "plcapp.h"
////TODO: define our states //// Your states are defined by static functions which get a pointer to the statemachine //// The pointer sm->user might be used to transfer the address of a user defined datastructure //// A transition from one state to the next is done by sm->gotoState(theNextState); //// Your statemachine runs within a separate thread and the current state is called within "cycletime" intervals static void stStart(rlState *sm); static void stProcess(rlState *sm); static void stFinish(rlState *sm);
////TODO: implement our states
static void stStart(rlState *sm)
{
shm_data->plc.out.out1 = 1; // set output 1 in shared memory
if(sm->stepCounter > 20)
{
shm_data->plc.out.out1 = 2; // reset output 1 in shared memory
strcpy(shm_data->plc.state.stm2_name,"Process"); // set next state name in shared memory
sm->gotoState(stProcess); // goto the next state
}
}static void stProcess(rlState *sm)
{
shm_data->plc.out.out1 = sm->stepCounter; // set output 1 in shared memory
if(sm->stepCounter > 30)
{
strcpy(shm_data->plc.state.stm2_name,"Finish"); // set next state name in shared memory
sm->gotoState(stFinish); // goto the next state
}
}static void stFinish(rlState *sm)
{
shm_data->plc.out.out1 = 1; // set output 1 in shared memory
if(sm->stepCounter > 30)
{
shm_data->plc.out.out1 = 0; // reset output 1 in shared memory
strcpy(shm_data->plc.state.stm2_name,"NULL"); // set next state name NULL
shm_data->plc.state.stm2_running = 0; // reset running in shared memory
sm->gotoState(NULL); // goto NULL state
}
}int startStepsStm2(rlState *sm, int cycletime) // start our statemachine
{
if(trace) printf("stm2 starting\n");
shm_data->plc.state.stm2_running = 1; // set running in shared memory
strcpy(shm_data->plc.state.stm2_name,"Start"); // set next state name in shared memory
sm->gotoState(stStart); // goto nextState
sm->startSteps(cycletime); // start a thread which handles the statemachine
return 0;
}// *************************************************************************** // stm1.cpp - description // ----------------— // begin : Sa. Mai 4 09:29:07 2013 // generated by : pvdevelop (C) Lehrig Software Engineering // email : lehrig@t-online.de // *************************************************************************** #include "plcapp.h" extern rlState sm2;
////TODO: define our states static void stStart(rlState *sm);
////TODO: implement our states
static void stStart(rlState *sm)
{
shm_data->plc.out.out2 = sm->stepCounter;
if(shm_data->plc.state.stm2_running == 0)
{
if(shm_data->pvs.state.button_start_stm2 == 1)
{
startStepsStm2(&sm2, 100); // start statemachine 2 thread
}
else if(shm_data->plc.in.in1 & BIT1)
{
startStepsStm2(&sm2, 100); // start statemachine 2 thread
}
}
}int startStepsStm1(rlState *sm, int cycletime) // start our statemachine
{
if(trace) printf("Start stm1\n");
shm_data->plc.state.stm1_running = 1; // set running within shared memory
sm->gotoState(stStart); // goto nextState
sm->startSteps(cycletime); // start a thread that will handle our statemachine
return 0;
}
Constructor & Destructor Documentation
◆ rlState()
| rlState::rlState | ( | ) |
Definition at line 18 of file rlstate.cpp.
◆ ~rlState()
| rlState::~rlState | ( | ) |
Definition at line 27 of file rlstate.cpp.
Member Function Documentation
◆ gotoState()
| void rlState::gotoState | ( | void(*)(rlState *sm) | funcPtr | ) |
Definition at line 31 of file rlstate.cpp.
◆ runSteps()
| int rlState::runSteps | ( | int | cycletime | ) |
Definition at line 38 of file rlstate.cpp.
◆ startSteps()
| int rlState::startSteps | ( | int | cycletime | ) |
Definition at line 64 of file rlstate.cpp.
Member Data Documentation
◆ cycletime
◆ lastState
◆ MAX_STEP
◆ nextStep
◆ stepCounter
◆ thread
◆ user
The documentation for this class was generated from the following files:
