#include "rlcanopendaemon.h"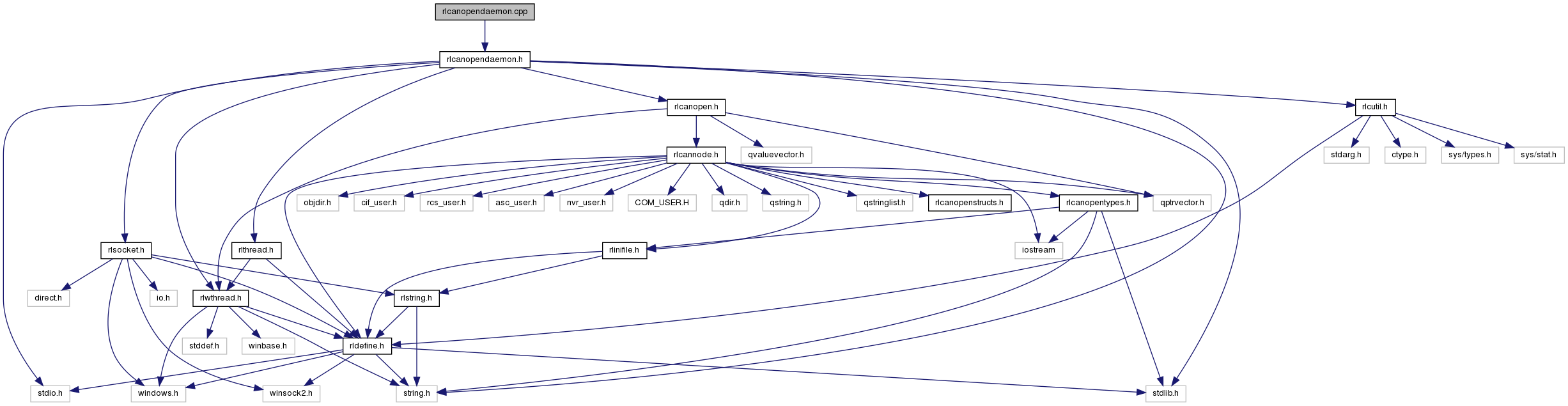
Go to the source code of this file.
Functions | |
| void | sdo_read (rlCanOpenDaemon *_daemonptr, rlSocket *_socket, IPCMSGSTRUCT *_message) |
| void | sdo_write (rlCanOpenDaemon *_daemonptr, rlSocket *_socket, IPCMSGSTRUCT *_message) |
| void | pdo_receive (rlCanOpenDaemon *_daemonptr, rlSocket *_socket, IPCMSGSTRUCT *_message) |
| void | pdo_transmit (rlCanOpenDaemon *_daemonptr, rlSocket *_socket, IPCMSGSTRUCT *_message) |
| void | nmt_transmit (rlCanOpenDaemon *_daemonptr, rlSocket *_socket, IPCMSGSTRUCT *_message) |
| void | restart_board (rlCanOpenDaemon *_daemonptr, rlSocket *_socket, IPCMSGSTRUCT *_message) |
| void | getNodeState (rlCanOpenDaemon *_daemonptr, rlSocket *_socket, IPCMSGSTRUCT *_message) |
| static void * | clientconnection (void *arg) |
| static void * | listenerthread (void *arg) |
Function Documentation
◆ clientconnection()
|
static |
handels a new client connection established by listener thread. Saves socket descriptor in new socket object. Runs a loop which reads IPCMSGSTRUCTs containing client requests and calls appropiate handler functions which communicate with the canopen device and send answers back to the client. clientconnection Thread is terminated when client disconnects.
Definition at line 172 of file rlcanopendaemon.cpp.
◆ getNodeState()
| void getNodeState | ( | rlCanOpenDaemon * | _daemonptr, |
| rlSocket * | _socket, | ||
| IPCMSGSTRUCT * | _message | ||
| ) |
gets called from clientconnection thread. performs a getNodeState command on the canopen interface. received data is stored in an IPCMSGSTRUCT and sent back to the clientprocess
Definition at line 149 of file rlcanopendaemon.cpp.
◆ listenerthread()
|
static |
listenerthread waits for incoming client connections on the confugured port and spawns a new clientthread for each of them.
Definition at line 221 of file rlcanopendaemon.cpp.
◆ nmt_transmit()
| void nmt_transmit | ( | rlCanOpenDaemon * | _daemonptr, |
| rlSocket * | _socket, | ||
| IPCMSGSTRUCT * | _message | ||
| ) |
gets called from clientconnection thread. performs a nmt_transmit command on the canopen interface. received data is stored in an IPCMSGSTRUCT and sent back to the clientprocess
Definition at line 118 of file rlcanopendaemon.cpp.
◆ pdo_receive()
| void pdo_receive | ( | rlCanOpenDaemon * | _daemonptr, |
| rlSocket * | _socket, | ||
| IPCMSGSTRUCT * | _message | ||
| ) |
gets called from clientconnection thread. performs a pdo_receive command on the canopen interface. received data is stored in an IPCMSGSTRUCT and sent back to the clientprocess
Definition at line 58 of file rlcanopendaemon.cpp.
◆ pdo_transmit()
| void pdo_transmit | ( | rlCanOpenDaemon * | _daemonptr, |
| rlSocket * | _socket, | ||
| IPCMSGSTRUCT * | _message | ||
| ) |
gets called from clientconnection thread. performs a pdo_transmit command on the canopen interface. received data is stored in an IPCMSGSTRUCT and sent back to the clientprocess
Definition at line 88 of file rlcanopendaemon.cpp.
◆ restart_board()
| void restart_board | ( | rlCanOpenDaemon * | _daemonptr, |
| rlSocket * | _socket, | ||
| IPCMSGSTRUCT * | _message | ||
| ) |
gets called from clientconnection thread. performs a restartBoard command on the canopen interface. received data is stored in an IPCMSGSTRUCT and sent back to the clientprocess
Definition at line 134 of file rlcanopendaemon.cpp.
◆ sdo_read()
| void sdo_read | ( | rlCanOpenDaemon * | _daemonptr, |
| rlSocket * | _socket, | ||
| IPCMSGSTRUCT * | _message | ||
| ) |
gets called from clientconnection thread. performs a sdo_read command on the canopen interface. received data is stored in an IPCMSGSTRUCT and sent back to the clientprocess
Definition at line 21 of file rlcanopendaemon.cpp.
◆ sdo_write()
| void sdo_write | ( | rlCanOpenDaemon * | _daemonptr, |
| rlSocket * | _socket, | ||
| IPCMSGSTRUCT * | _message | ||
| ) |
gets called from clientconnection thread. performs a sdo_write command on the canopen interface. received data is stored in an IPCMSGSTRUCT and sent back to the clientprocess
Definition at line 39 of file rlcanopendaemon.cpp.
